PRO High Current BaseCam AlexMos SimpleBGC 3rd axis 32bit controller official
YES, this is a GENUINE Alex Mos new 32 bit 3 axis controller!
20AMPS per port
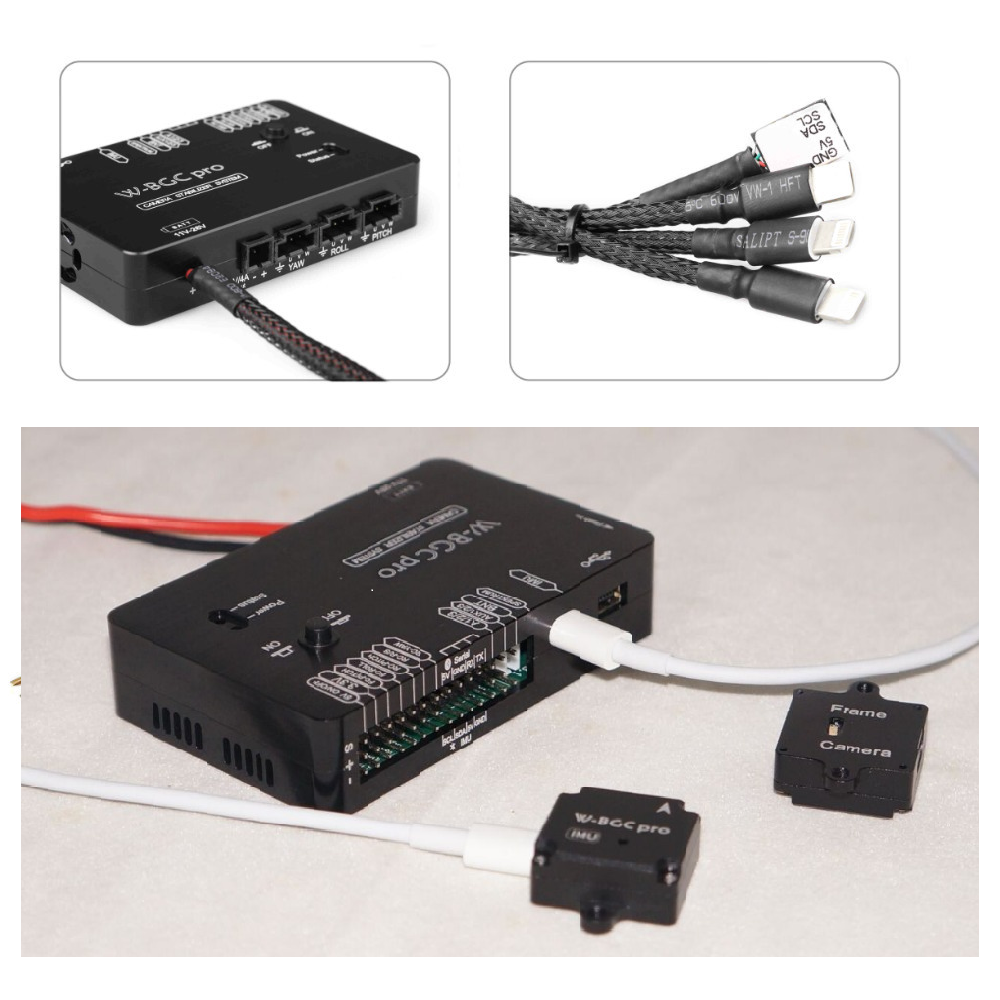
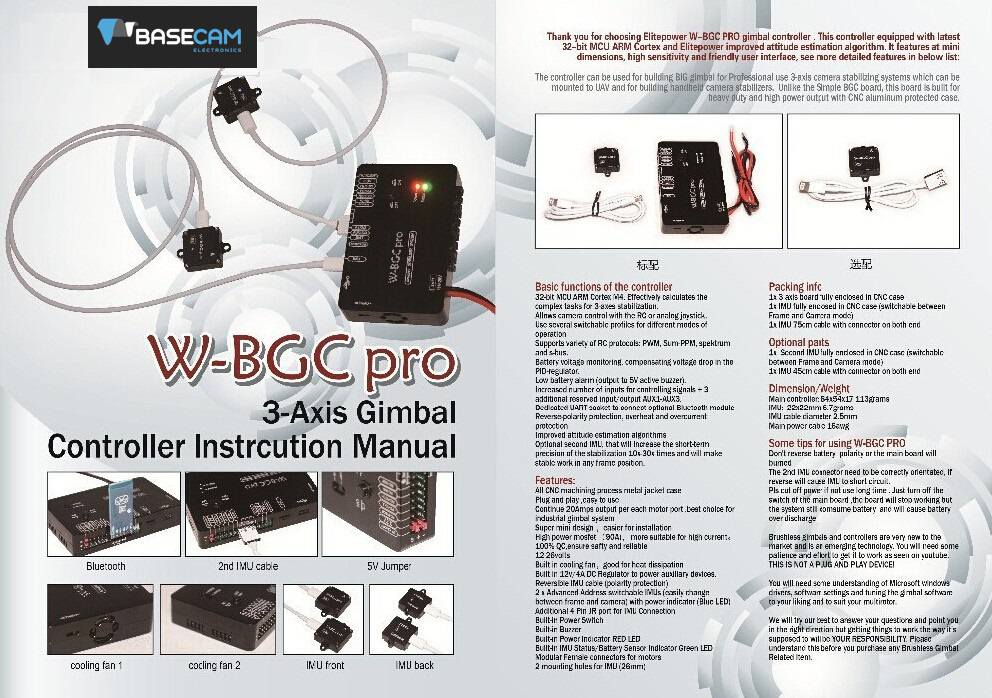
The controller can be used for building BIG gimbal for Professional use 3-axis camera stabilizing systems which can be mounted to UAV and for building handheld camera stabilizers. Unlike the Simple BGC board, this board is built for heavy duty and high power output with CNC aluminum protected case.
Basic functions of the controller
- 32-bit MCU ARM Cortex M4. Effectively calculates the complex tasks for 3-axes stabilization.
- Allows camera control with the RC or analog joystick.
- Use several switchable profiles for different modes of operation
- Supports variety of RC protocols: PWM, Sum-PPM, spektrum and s-bus.
- Battery voltage monitoring, compensating voltage drop in the PID-regulator.
- Low battery alarm (output to 5V active buzzer).
- Increased number of inputs for controlling signals + 3 additional reserved input/output AUX1-AUX3.
- Dedicated UART-socket to connect optional Bluetooth module
- Reverse-polarity protection, overheat and overcurrent protection
- Improved attitude estimation algorithms
- Optional second IMU, that will increase the short-term precision of the stabilization 10x-30x times and will make stable work in any frame position.
Specifications:
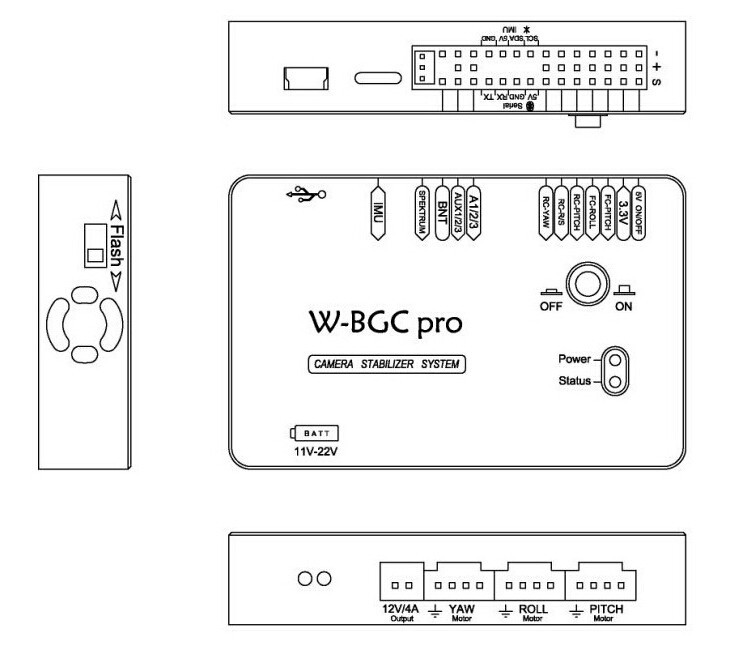
- 12-26volts
- Current handling up to 20 Amps Constant per EACH motor port
- Built in cooling fan
- Built in 12v/4A DC Regulator to power auxiliary devices.
- Reversible IMU cable (polarity protection)
- 2 x Advanced Address switchable IMUs (easily change between frame and camera) with power indicator (Blue LED)
- Additional 4 Pin JR port for IMU Connection
- Built-in Power Switch
- Built-in Buzzer
- Built-in Power Indicator RED LED
- Built-in IMU Status/Battery Sensor Indicator Green LED
- Modular Female connectors for motors
- 2 mounting holes for IMU (26mm)
Includes
- 1x 3 axis board fully enclosed in CNC case
- 2x IMU fully enclosed in CNC case (switchable between Frame and Camera mode)
- 1x IMU 72cm cable with connector on both end
- 1x IMU 42cm cable with connector on both end
Dimension/Weight
- Main controller: 84x54x17 113grams
- IMU: 22x22mm 6.7grams
- IMU cable diameter 2.5mm
- Main power cable 16awg
2.43b9
GUI (Windows, OS X, Linux): SimpleBGC_GUI_2_43b9.zip (6Mb 9.12.2014)
User Manual (English): SimpleBGC_32bit_manual_2_43_eng.pdf (813Kb 8.12.2014)
User Manual (French) translation by Nono15: SimpleBGC_32bit_manual_2_43_fra.pdf (1Mb 26.11.2014)
User Manual (Russian): SimpleBGC_32bit_manual_2_43_rus.pdf (950Kb 8.12.2014)
- (GUI): new option to enable auto-detection of system startup in the upside-down mode
- (GUI): New interactive dialog to detect sensor orientation
- (GUI): New interactive dialog to calibrate sensors
- Second UART port to process Serial API commands: Rx goes to RC_ROLL, Tx goes to RC_YAW. It can be enabled in the RC tab ->"RC_ROLL pin mode"
- Spektrum satellite new binding and data format options (used in the "Bind RC" command and to decode spektrum protocol)
- Bug fixed: in the Follow mode when the camera is pitched down about 90 degrees, its not controlled by YAW
- Bug fixed: calibration of accelerometer in the simple mode did not reset extended mode calibration, making a result of simple calibration not correct.
- Bug fixed: "Estimate angle from motors" doesnt work in 2.43b6
- Minor bug fixed with firmware update dialog.
- Recovery firmware works now with USB connection on v.3.1 "Tiny" boards.